
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

ステッピングモーターとサーボとサーボモーターの違いを理解するための記事
I. ステッピングモーターとサーボとサーボモーターの違い
ステッピング モーター: 開ループ制御要素ステッピング モーター部品の角変位または線変位への電気パルス信号です。簡単に言えば、電気パルス信号に基づいて角度と回転数を制御します。したがって、回転量を決定するにはパルス信号のみを頼りにします。センサーが無いため停止角度がずれる場合があります。ただし、正確なパルス信号により偏差は最小限に抑えられます。
サーボモーター: サーボ制御回路に依存してモーターの速度を制御し、センサーを通じて回転位置を制御します。したがって、位置制御は非常に正確です。そして回転速度も可変です。
サーボ (電子サーボ): サーボの主なコンポーネントはサーボ モーターです。サーボモーター制御回路+減速機セットを内蔵しています。そうそう、サーボモーターには減速機がセットされていません。そしてサーボには減速機がセットされています。
リミットサーボの場合、出力シャフトの下にあるポテンショメータを利用してラダーアームのステアリング角度を決定します。サーボ信号制御はパルス幅変調 (PWM) 信号であり、マイクロコントローラーでこの信号を簡単に生成できます。
II.ステッピングモーターの基本原理
仕組み:
通常、モーターの回転子は永久磁石であり、固定子巻線に電流が流れると、固定子巻線はベクトル磁界を生成します。この磁界は回転子をある角度だけ回転させるため、回転子の一対の磁界の方向は固定子の磁界の方向と同じになります。固定子のベクトル磁界がある角度回転したとき。ローターもこの磁場によってある角度だけ回転します。電気パルスが入力されるたびに、モーターは 1 角度ずつ前方に回転します。その出力角変位は入力パルスの数に比例し、その回転速度はパルスの周波数に比例します。巻線に通電する順序を変更すると、モーターが逆転します。したがって、パルスの数と周波数、およびモーターの各相の巻線に通電する順序を制御して、ステッピングモーターの回転を制御できます。
発熱原理:
通常、あらゆる種類のモーターが見られますが、内部には鉄心と巻線コイルがあります。巻線抵抗、電力は損失、損失サイズ、抵抗を生成し、電流は二乗に比例します。これは銅損と呼ばれることが多く、電流が標準の DC または正弦波でない場合、高調波損失も生成されます。コアにはヒステリシス渦電流効果があり、交流磁場では材料の大きさ、電流、周波数、電圧に関連する損失が発生し、これを鉄損と呼びます。銅損や鉄損は発熱となって現れ、モータの効率に影響を与えます。ステッピングモーターは一般に位置決め精度とトルク出力を追求し、効率が比較的低く、電流が一般に大きく、高調波成分が高く、電流の周波数が速度や変化に応じて変化するため、ステッピングモーターは一般に発熱状況があり、その状況は一般的なACモーターよりも深刻です。
Ⅲ.舵の構造
サーボは主にハウジング、回路基板、駆動モーター、減速機、位置検出素子で構成されています。動作原理は、受信機からサーボに信号を送信し、基板上のICによりコアレスモーターが回転を開始し、その動力が減速機を介してスイングアームに伝達され、同時に位置検出器から位置決めに到達したか否かを判断する信号が返信されます。位置検出器は実際には可変抵抗器です。サーボが回転するとそれに応じて抵抗値が変化し、その抵抗値を検出することで回転角度を知ることができます。一般的なサーボモータは、3極のローターに細い銅線を巻き付けたもので、コイルに電流を流すと磁界が発生し、ローターの周囲に磁石が反発し、回転力を発生させます。物理学によれば、物体の慣性モーメントはその質量に正比例するため、回転させる物体の質量が大きいほど、必要な力も大きくなります。サーボは、高速回転と低消費電力を実現するために、細い銅線を撚り合わせた極細の中空円筒で極を持たない非常に軽量な中空ローターを形成し、その円筒の中に磁石を配置した中空カップモーターを採用しています。
さまざまな使用環境に合わせて、防水・防塵設計のサーボを用意しています。サーボ用ギヤには、負荷の要求に応じてプラスチックギヤと金属ギヤがあり、一般にサーボ用金属ギヤは高トルクかつ高速であり、過大な負荷によるギヤの欠けが少ないという利点があります。より高いグレードのサーボにはボールベアリングが装備されており、回転がより速く、より正確になります。 1 つのボール ベアリングと 2 つのボール ベアリングには違いがあります。もちろん 2 つのボール ベアリングの方が優れています。新しいFETサーボは主にFET(電界効果トランジスタ)を使用しており、内部抵抗が低く、通常のトランジスタよりも電流損失が少ないという利点があります。
IV.サーボの動作原理
pwm波を内部回路に入力してバイアス電圧を生成し、減速機を介してコンタクタジェネレータを介してポテンショメータを駆動し、電圧差がゼロになるとモータが停止し、サーボの効果が得られます。
サーボ PWM のプロトコルはすべて同じですが、登場する最新のサーボは異なる場合があります。
プロトコルは一般的に、0.5ms ~ 2.5ms のハイレベル幅でサーボを制御し、さまざまな角度で回転します。
V. サーボモーターの仕組み
下図はパワーオペアンプLM675を使用したサーボモータ制御回路で、モータはDCサーボモータです。図からわかるように、パワーオペアンプ LM675 には 15V が供給されており、その 15V 電圧が RP1 を介してオペアンプ LM675 の同相入力に加えられ、LM675 の出力電圧がサーボモータの入力に加えられます。モーターには、モーター速度をリアルタイムに検出するための速度測定信号発生器が装備されています。実際、速度信号発生器は一種の発電機であり、その出力電圧は回転速度に比例します。速度測定信号発生器Gから出力された電圧は、分圧回路を経て速度誤差信号としてオペアンプの反転入力にフィードバックされる。速度指令設定器 RP1 で設定した電圧値は、基準電圧に相当する R1.R2 で分圧されてオペアンプの同相入力に加算されます。
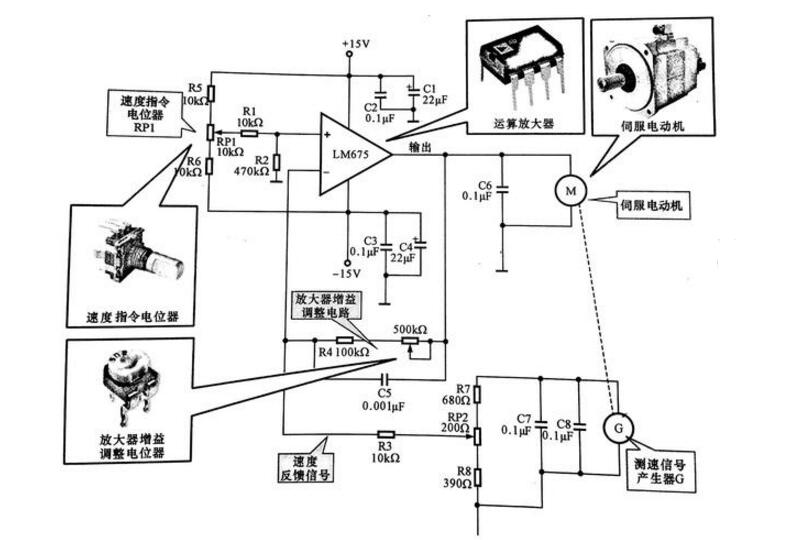
サーボモーターの制御回路図
サーボモーター: サーボモーターの文字 M で示され、駆動システムの動力源です。オペアンプ: 回路名 (つまり、LM675) で示される、サーボ モーターに駆動電流を供給するサーボ制御回路内のアンプ部分です。
速度指令設定器 RP1: 回路内のオペアンプの基準電圧、つまり速度設定を設定します。アンプゲイン調整ポテンショメータ RP2: アンプゲインと速度フィードバック信号のサイズをそれぞれ微調整するために回路で使用されます。
モータの負荷が変化すると、オペアンプの反転入力にフィードバックされる電圧も変化します。つまり、モータの負荷が増加すると、速度が低下し、速度信号発生器の出力電圧も低下します。そのため、オペアンプの反転入力の電圧が減少し、この電圧と基準電圧との差が増加し、オペアンプの出力電圧が増加します。逆に、負荷が小さくなりモータ回転数が上昇すると、速度測定信号発生器の出力電圧が上昇し、オペアンプの反転入力に加わるフィードバック電圧が増加し、この電圧と基準電圧との差が小さくなり、オペアンプの出力電圧が低下し、それに伴ってモータ回転数が低下するため、回転数を設定値に自動的に安定させることができます。


